

¿Un paseo por la luna?… Tenemos el vehículo. Un pequeño 4×4 con motores eléctricos nos podría llevar a dar una vuelta por el Mar de la Tranquilidad. Lo difícil será llegar hasta allí, pero esa ya es otra historia…
Érase una vez un ingeniero, Ferdinand Porsche, que en 1900 ideó un vehículo de tracción a las cuatro ruedas cuando trabajaba para el fabricante de carruajes de lujo Jacob Lohner&Co. Y érase otra vez, en 1969, la aeronáutica Boeing, que fabricó el primer vehículo lunar. Pero ¿qué tienen en común los principios de estas dos historias? Pues ni más ni menos que una idea, un concepto de vehículo y de motor que todavía hoy sigue siendo protagonista de los proyectos más ambiciosos del panorama 4×4.

Se trata del motor eléctrico de buje de rueda, que no es otro que el que propulsaba al archifamoso Lohner – Porsche (ver artículo correspondiente), y el germen de la idea del primer LRV (Lunar Rover Vehicle) y de todos los proyectos de vehículos espaciales posteriores, que, aunque más avanzados tecnológicamente, siguen basándose en el motor eléctrico por rueda para asegurar la tracción total. Así que, podemos decir sin temor a equivocarnos, que el primer 4×4 que se inventó ha sido también el que más lejos ha llevado al hombre. Al menos hasta el momento.
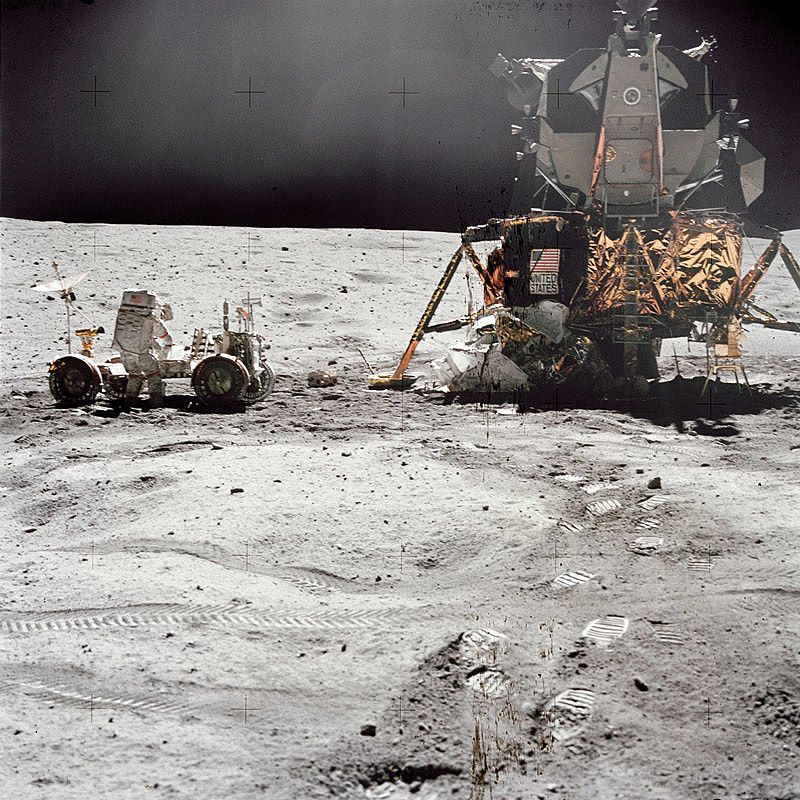
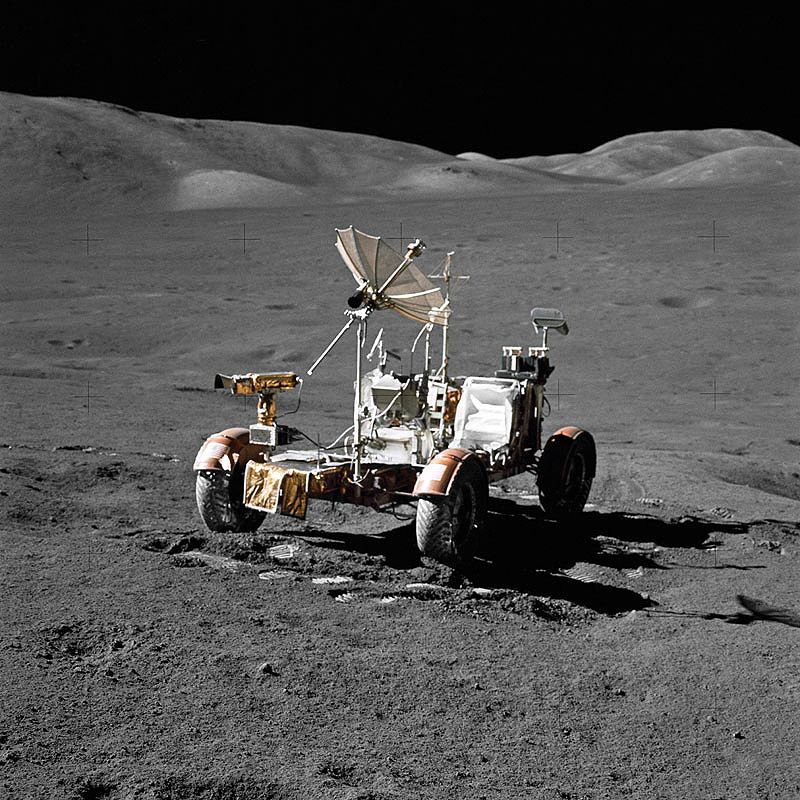
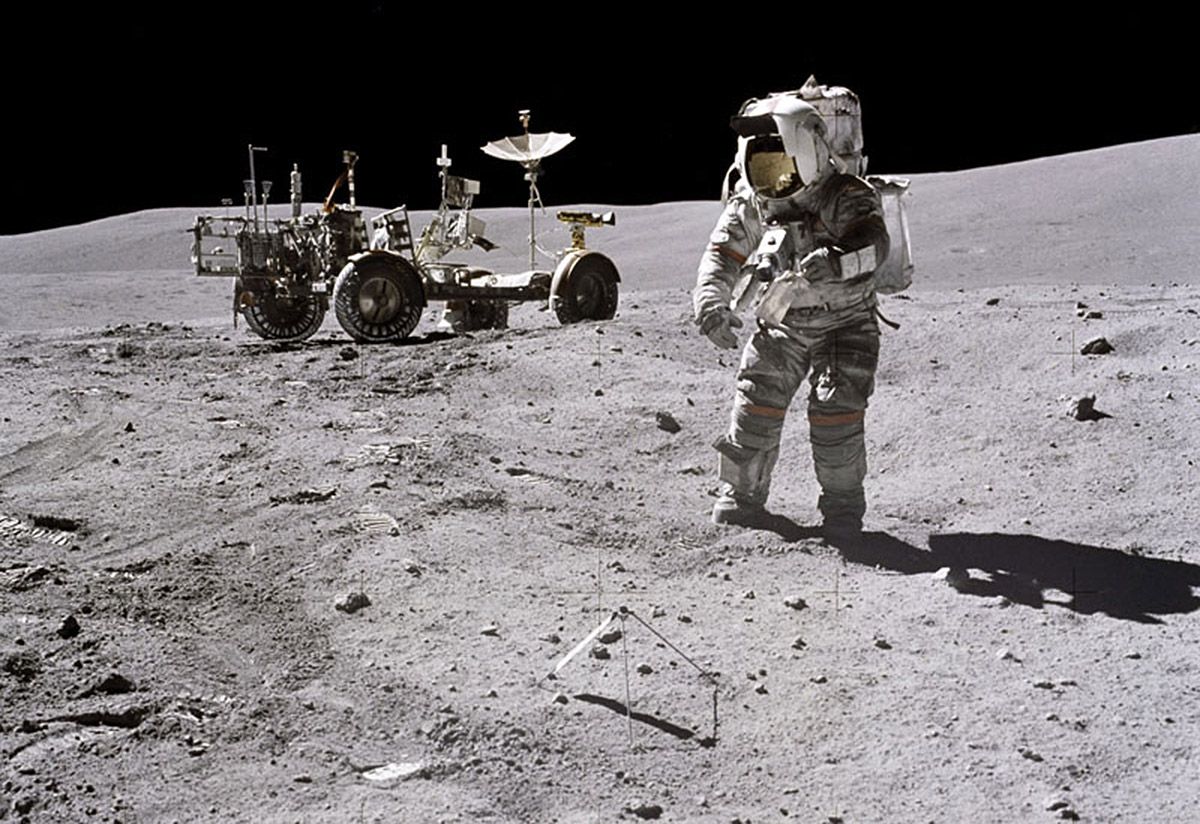
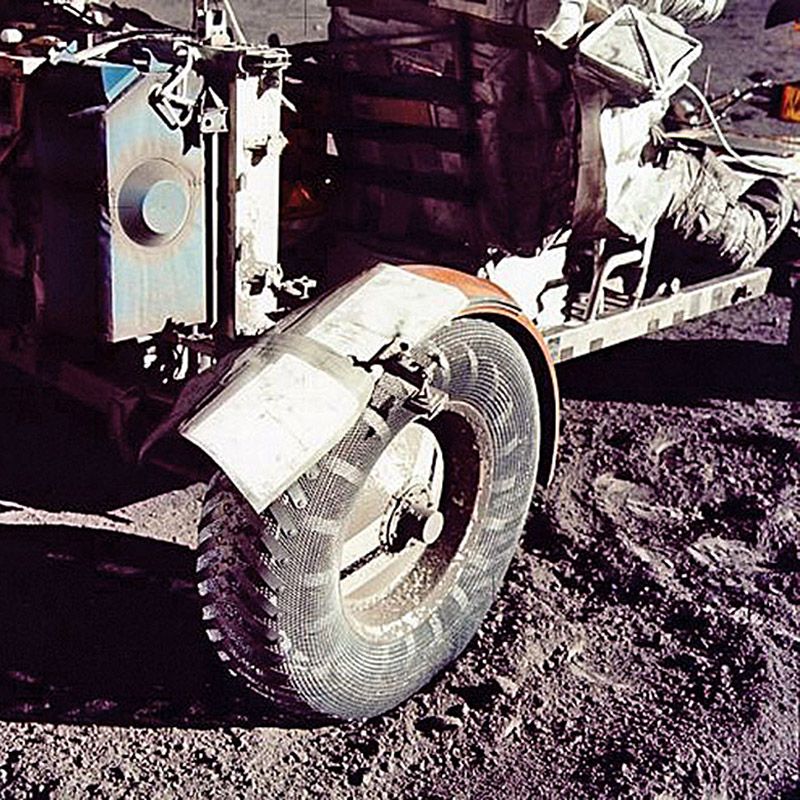
El primer LRV pisó la luna el 26 de julio de 1971. Viajó hasta allí acoplado a la cápsula lunar del Apollo (la parte de la nave diseñada para el desembarco en la luna) en las misiones 15, 16 y 17. En estos viajes no sólo era necesario adaptarse a un terreno escarpado, sino también a otras circunstancias como la temperatura y la gravedad. De hecho, el LRV podía soportar oscilaciones de temperatura de 100º, por encima y por debajo de 0º; y por otra parte, tenía la resistencia suficiente como para soportar cuatro veces sus 209,5 kg (unos 180 en el vacío). Para adaptarse a aquél terreno pedregoso y extraño, las ruedas estaban hechas con un tejido especial a base de cuerdas de piano de 90 pulgadas. Cada una de ellas (de ahí el parentesco con el Porsche Lohner) llevaba incorporado su propio motor eléctrico, alimentado por dos baterías de 36 voltios; y se estimaba que cada uno de los motores tenía una vida útil de 75.000 revoluciones, lo que equivale aproximadamente a 180 km. Como medida de seguridad, cada una de las ruedas se podía liberar del motor y seguir girando, de modo que si un motor se averiaba, el coche podía avanzar a una velocidad mínima propulsado por el resto de los motores.
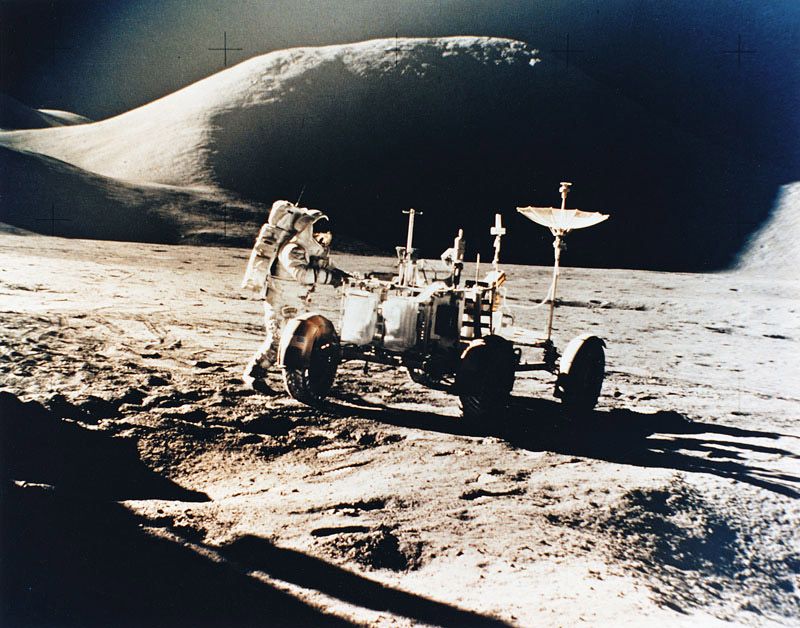
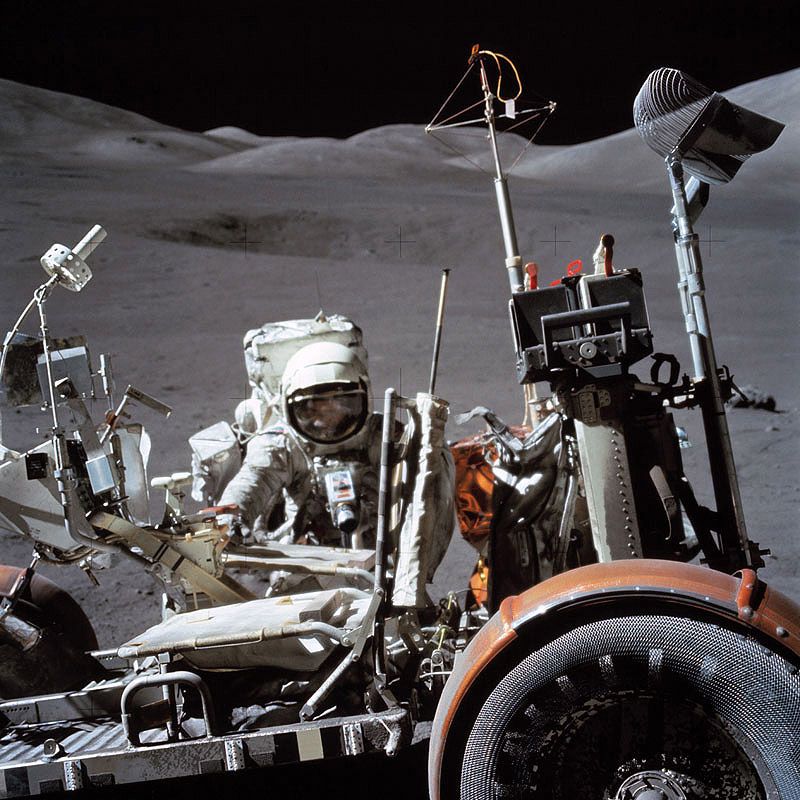
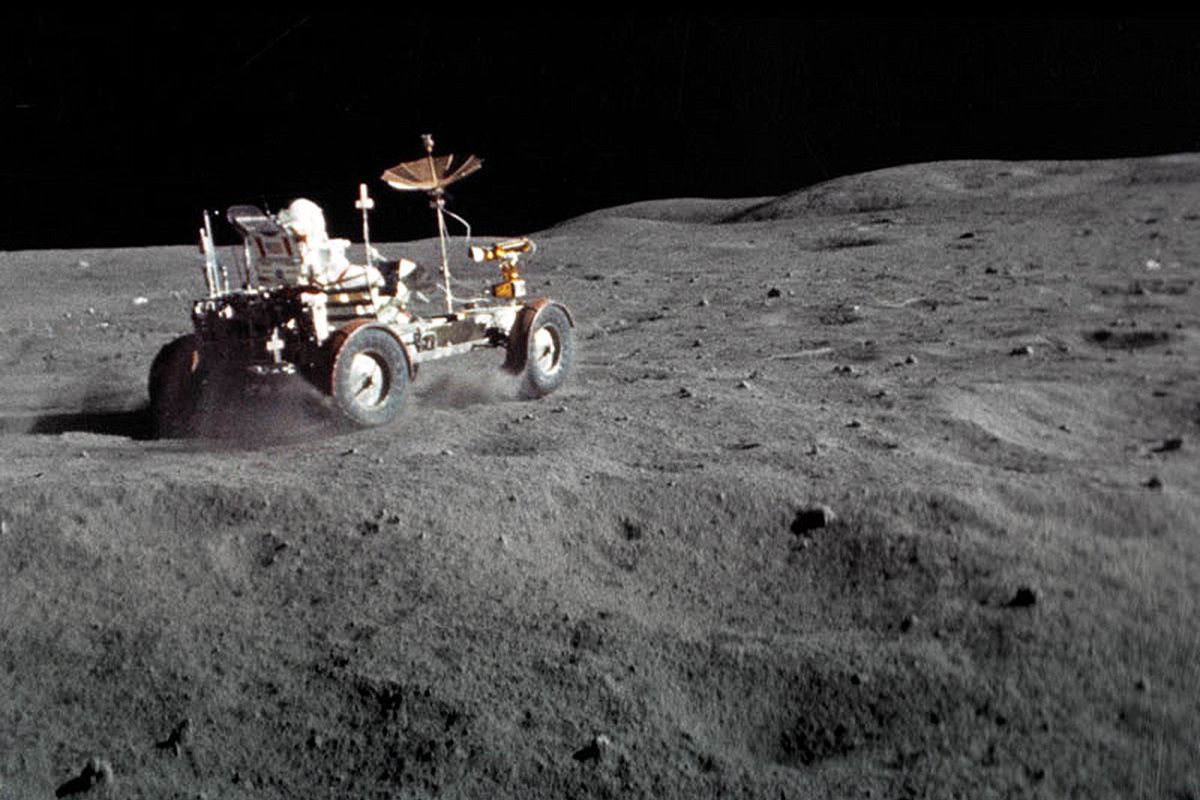
Teniendo en cuenta que los astronautas no podían desplazarse a más de 9.6 km. a la redonda del Módulo Lunar (que equivale a la distancia que podían recorrer a pie en caso de emergencia), el LRV, en la misión Apollo 15, realizó 90,8 km, a una velocidad máxima de 16 km/h. El chasis, a 35 cm del suelo, estaba compuesto de tres partes: en la delantera, se colocaron las baterías, la unidad de proceso de la información y los controles electrónicos de marcha y dirección, en la central, los asientos de los astronautas, la consola de control y la palanca de dirección entre los dos asientos.

En cuanto al “equipamiento”, el Rover, que era biplaza, llevaba una cámara de televisión en color, tomavistas de 16mm, cámara de fotos de 70mm, perforadora de suelo, pinzas para recoger muestras, magnetómetro, herramientas, repuestos y un navegador que indicaba la dirección del vehículo, la distancia total recorrida y la distancia al Módulo Lunar, gracias a lo que los astronautas pudieron llegar en él a menos de 100m de distancia del módulo.
BANCO DE DATOS (ROVER LUNAR):
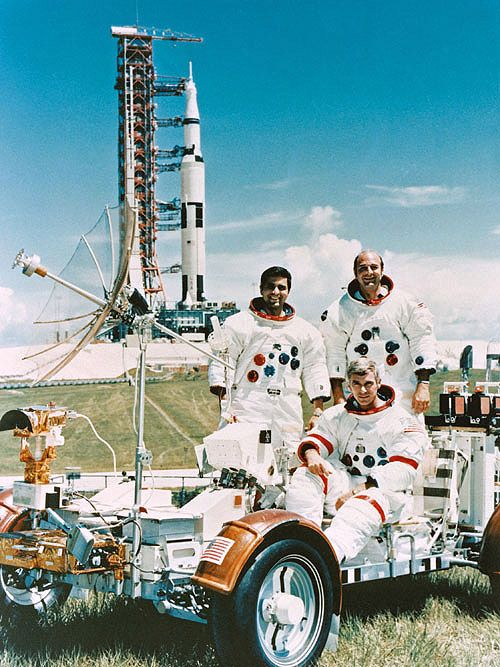
Tripulación: David R. Scott , James B. Irwin, Alfred M. Worden
Duración: 12 días, 17 horas, 12 min, segundos…
Localización en la Luna: Hadley-Apennine
Coordenadas: 26.08 grados Norte, 3.66 grados Este
Velocidad máxima: 16 km/h
Dimensiones: 3,10 x 1.82 metros
Peso: 181 Kg en el vacío. 209,5 kg. en la Tierra.
Motor: 4 motores eléctricos (uno por rueda) de 0,25 CV cada uno.
Alimentación: dos baterías de 36 Voltios.
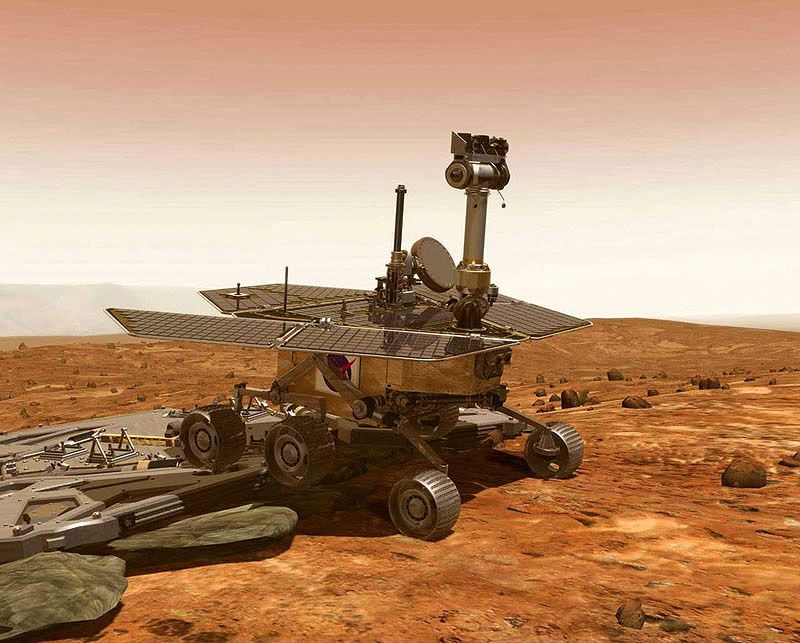
A Marte en un TT seis ruedas
Marte fue el siguiente objetivo de exploración, pero a diferencia de los LRV lunares el primer todoterreno (RVM) rastreando la superficie del Planeta Rojo (RVM) era un robot apellidado Opportunity (su compañero Spirit cayó en acto de servicio) de seis ruedas, cada una de ellas propulsada por un motor eléctrico individual, aunque sólo las delanteras y las traseras eran capaces de hacer girar 360º el vehículo. Las ruedas centrales sólo aportaban la curvatura necesaria para adaptarse mejor al terreno. El diferencial de los Rovers de Marte permitia adaptar el vehículo a todas las posiciones que cada una de las ruedas podía adoptar, de modo que cuando una de ellas subía o bajaba por un terreno escarpado, las otras equilibranban el vehículo. Por eso, el sistema obligaba al Rover a moverse sólo la mitad de lo que era capaz. Eso sí, no eran rápidos… el Opportunity –al igual que Spirit- se movía a una velocidad máxima de 5 cm. por segundo, y por motivos de seguridad, estaba programado para detenerse a observar y “entender” el terreno en secuencias de 10 y 20 segundos. Se alimentaban con energía solar durante el día y con baterías recargables.